Data Science Learning Path or Steps to become a data scientist Final
Last updated on July 27, 2020
There is a massive shortage of quality data scientists on the market right now (Source). IBM predicts the market demand for data scientists to rise by 28% increase by 2020. That means there is a lot of room left for data scientists.
We produce 2.5 quintillions of data, and that number will increase with the advancement in IoT. The current world needs more professionals who can play around with data. The corporations do not utilize their collected data due to lack of skilled data science workforce who can extract valuable insights from the massive pool of information.
The cost of wrong data is $3 trillion annually in the United States. On the other hand, the smart use of collected data can significantly enhance the revenue and productivity of an organization (Source).
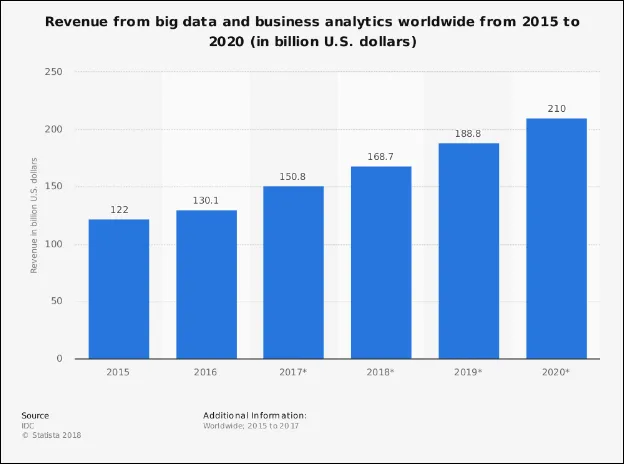 Image Source: Statista
Image Source: Statista
The average pay of data scientists surpasses $115k annually (Source). Do you want to fill the gap between demand and supply? In this article, we will reveal steps that can help you be a skilled data scientist.
Steps to come out as a data scientist #
The data scientists are responsible for extracting, filtering, and interpreting data in a meaningful way with the use of various statistical and machine learning tools and techniques. Here are the steps that you need to follow to be a data scientist:
Do you meet the basic requirements to apply for a job?
The corporations who are looking to hire data scientists need some degree. Here is one of the posts of data scientist vacancy.
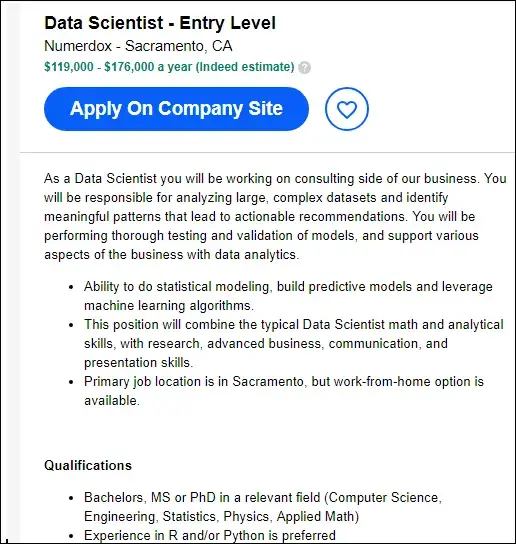 Image Source: Indeed
Image Source: IndeedMost of the jobs on the market require you to at least have a bachelor’s degree in a relevant field like computer science, statistics, applied mathematics, and so on. You will be eligible to apply for the majority of job posts if you have a related degree. If you keep an eye on the pay scale, you will see that even a beginner position surpasses $95k annually.
Understand about various aspects of data science
It is crucial to know what you’re going to experience in advance on the road to becoming a data scientist. Do some research about the duties and responsibilities of data scientists. After that, you need to select the tools and programming language. Currently, R and Python are the two preferred programming languages in the field of data science. I would recommend Python training due to its ease of learning and flexibility.
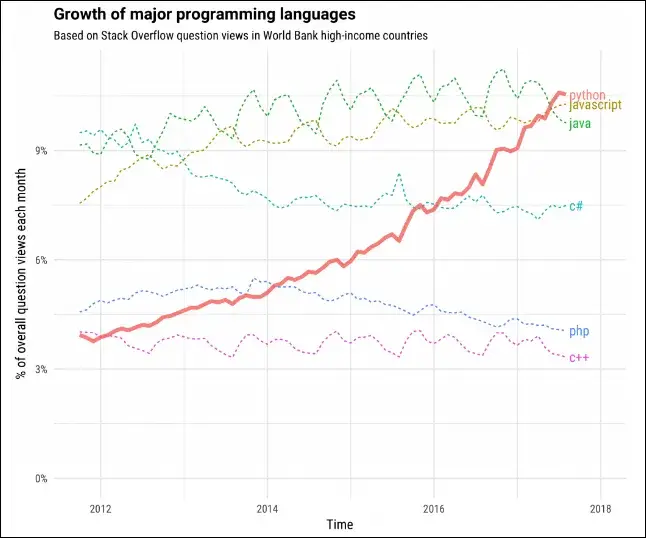 Image Source: Stack Overflow
Image Source: Stack OverflowGet some knowledge of basic mathematics and statistics
You must have a core knowledge of basic mathematics and statistics to become an outstanding data scientist. It is possible for you to use the tools for performing calculations. However, you will not be able to fulfill your responsibilities efficiently without a strong foundation in both mathematics and statistics.
The data scientists need to frequently use statistic methods (descriptive and inferential analysis) and numerical solutions (linear algebra) in their jobs. You should also be keen to solve problems, applying logic because that is what you are going to do in your career.
Time for some essential machine learning
There is a considerable role of machine learning in data science. The knowledge of machine learning can help you accomplish great things in your profession. At first, you should only get the necessary know-how of machine learning to be able to perform more in-depth applications of it in your job.
The Python programming language is also prevalent for performing machine learning applications. Many professionals prefer implementing machine learning with Python. Due to the full range of applications, it is better to learn Python. You can jump into web applications, game development, and more with Python.
Dig deeper into machine learning applications
After you have a strong foundation of machine learning, you can dig deeper into machine learning applications that you can apply in your job. You can learn some advanced applications, such as boosting algorithm, time series methods, random forest, ensemble learning, and so on. Right after algorithm, you should know how to improve models and bring new predictive models with tricks, such as validation strategies along with feature engineering.
You can use machine learning for producing accurate results and use data-driven models for processing data in real time.
Get some concepts of deep learning
After gaining a good grasp of machine learning, it is a time for you to get into deep learning. Deep learning is an integral part of machine learning. Having a solid knowledge of deep learning can significantly increase your value as a data scientist. At first, you should only get a basic understanding of deep learning, such as a neural network. Also, get your feet wet with Keras.
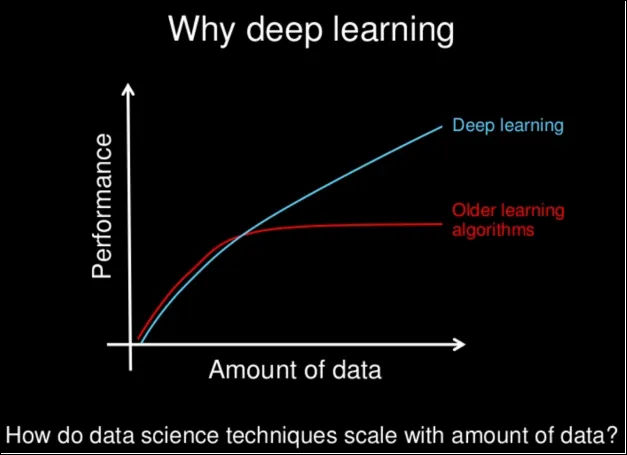 Image Source: Machine Learning Mastery
Image Source: Machine Learning MasteryDig deeper into advanced deep learning applications
After you have some strong foundation of machine learning and deep learning, you can now jump into advance neural network frameworks. The neural network frameworks to focus on are convolutional and recurrent neural networks. You will need some time to understand those concepts. I suggest you be patient while learning these advanced deep learning concepts. You may need to invest a few weeks of your time in acquiring them.
Learn computer vision applications
Computer vision application is a trending technology. It has touched different industries like manufacturing, retail, construction, and so on. Some of the examples of these technologies are face detection technologies like MobileNet, object recognition technology like ResNet, and so on.
The data scientists can use these technologies to extract useful insights from images, objects, and so on. You will get more tasks as a data scientist where the computer vision applications will come handy.
Natural Language Processing
Finally, you need to learn about natural language processing to sharpen your skill as a data scientist. You must at least have a basic understanding of the concepts, such as text preprocessing and text classification.
How can I get started learning all these concepts and skills? #
We have broken down the steps to become a data scientist. However, some of you might be confused on how to start learning all the things that I have mentioned above. The task of learning is not difficult in this day and age. You have information in your fingertips. There are plenty of quality resources that you can access for free or for an affordable price.
The market size of the eLearning industry is expected to rise to $325 by 2025. The only thing you need to do is find appropriate articles, videos, and courses to enroll and start learning.
Over to You #
If you have reached this portion of the article, you must be clear about what to do next. You need to follow the steps that I have mentioned to be a data science professional. Every single step takes a lot of time and effort.
Before jumping into the field of data science, you must decide if you want to be a data scientist or not. Do not dive into data science only because of a lucrative pay package. If there is something that you want to add, feel free to leave your opinion in the comment section. I would love to know your thoughts.
Load Comments